Guide: Robotics Club - IIT Tirupati
[Oct '22 - Dec '22]
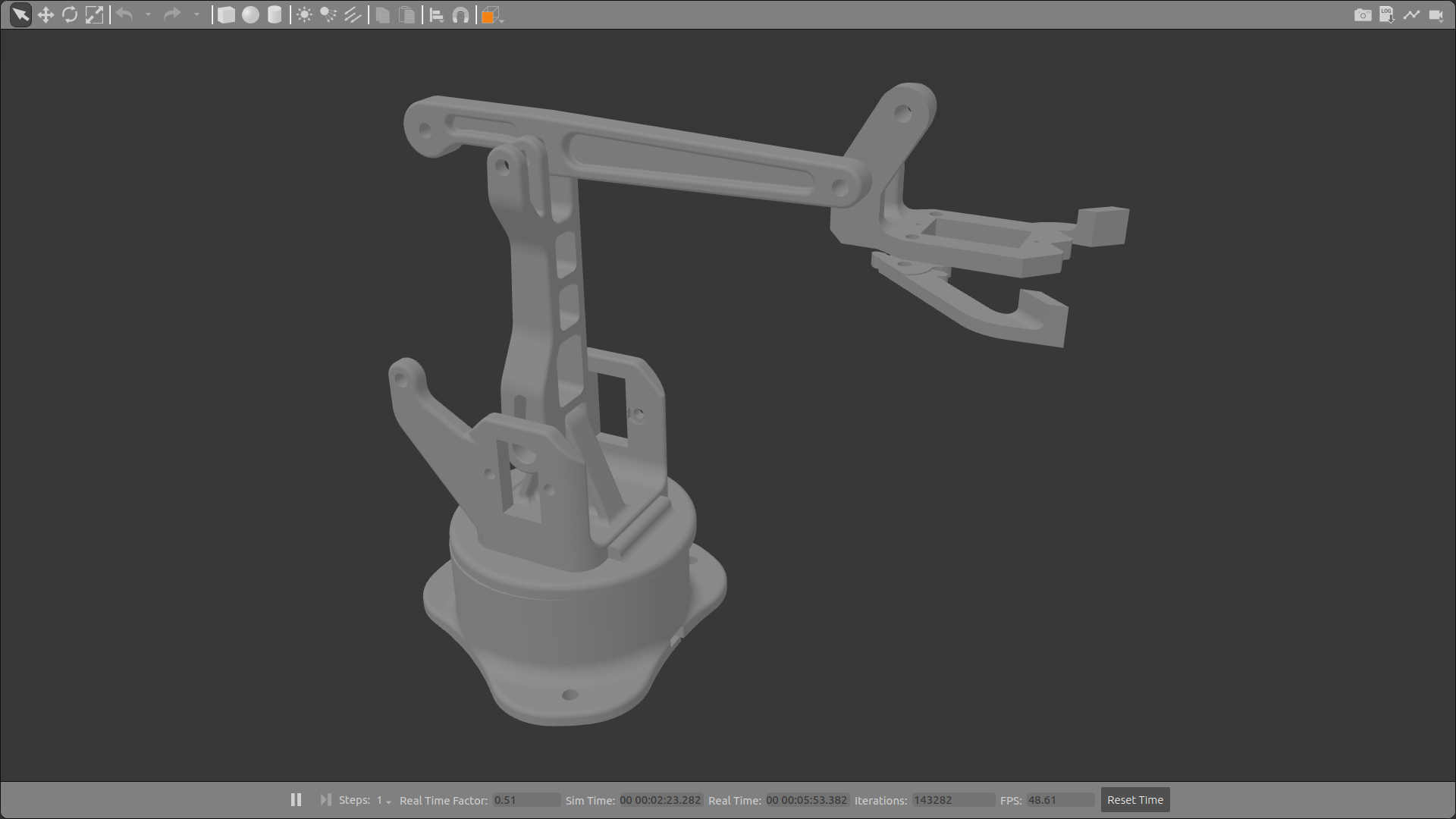
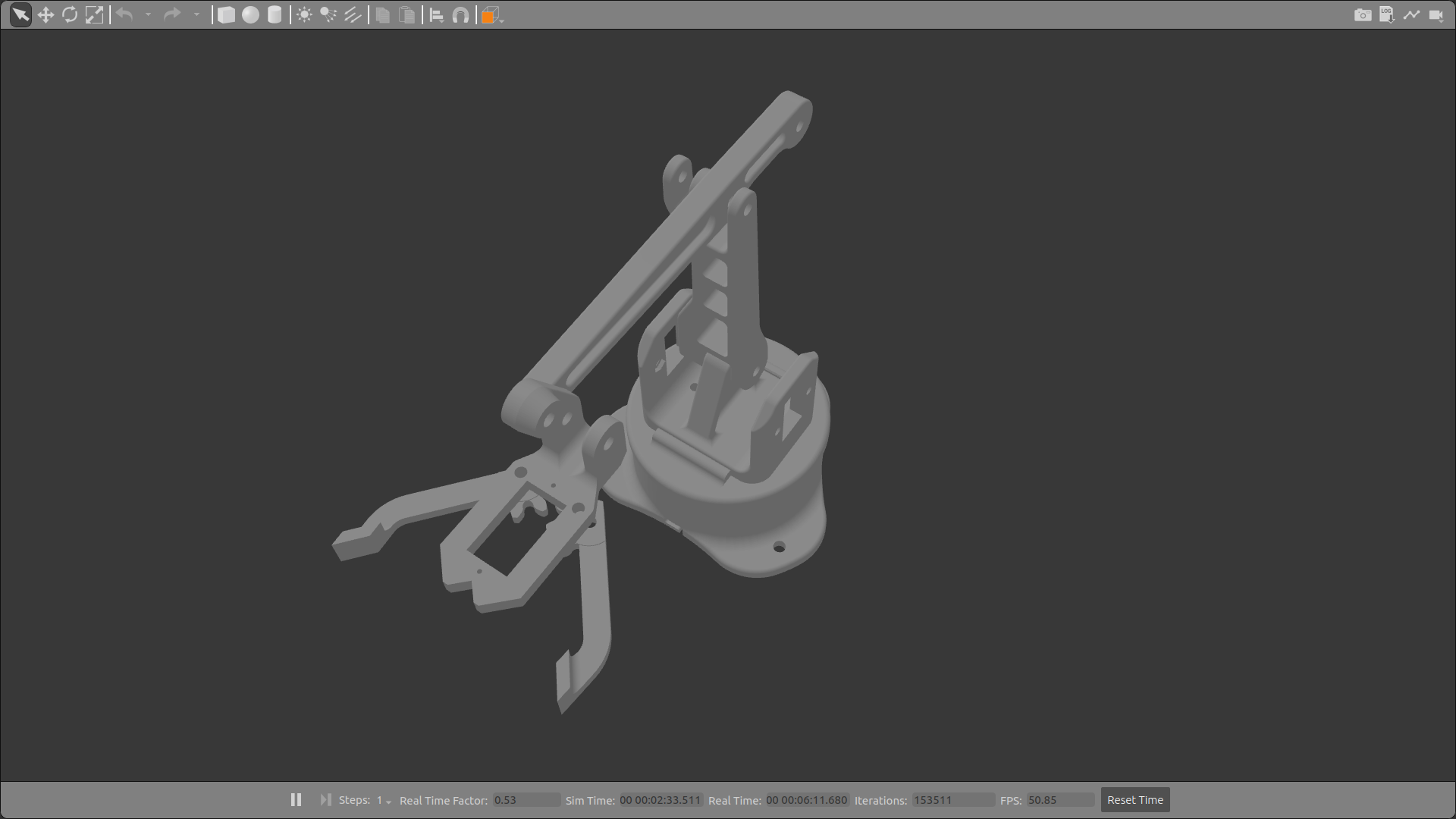
In this project, I developed a simulated 3-Degree of Freedom (3-DoF) robotic manipulator capable of executing tasks through voice commands using the power of Alexa Voice Service. Leveraging a combination of technologies, including the Alexa API, ROS (Robot Operating System), Gazebo, RViz, and MoveIt.
Key Components and Technologies:
- Alexa API Integration: The project incorporated the Alexa Voice Service API, allowing the robotic manipulator to understand and respond to voice commands issued by the user. This integration enabled seamless communication between the user and the robot through sending and receiving json files, making it as intuitive as instructing a personal assistant.
- ROS (Robot Operating System): The backbone of this project was the ROS, a versatile framework for developing and controlling robotic systems. ROS facilitated the management of hardware abstraction, device drivers, communication between processes, and more, ensuring the smooth operation of the robotic manipulator.
- Gazebo Simulation: I created a realistic robotic environment using Gazebo, a popular robot simulation tool. This 3D simulation platform accurately represented the physical world, enabling us to test and refine the robotic manipulator's movements and interactions before deploying it in the real world.
- RViz Visualization: To provide an interactive and user-friendly interface, I utilized RViz, a visualization tool for ROS. This allowed users to visualize the robot's movements and understand its actions in real-time.
- MoveIt Motion Planning: MoveIt, a motion planning framework for ROS, was employed to generate collision-free motion paths for the robotic manipulator. This ensured the robot's ability to execute tasks safely and efficiently, even in complex environments.