
Work Experience
Motion Planning and Controls Engineer
Odys Aviation
June 2025 - Present
- Building motion planning pipelines for autonomous ship deck landings of aerial vehicles, implemented on parallel systems using PX4 and Veronte autopilots.
- Designing and training machine learning algorithm to capture and predict aircraft dynamic behavior across a high-dimensional (>100) feature space, enabling real-time anomaly detection during flight operations.
- Designing real-time CAN and RS485 communication framework for aerial robots deployed on Jetson AGX Orin.
- Working on GNSS-denied localization using Visual-Inertial Odometry and satellite image matching.
- Enhancing backend systems for a trajectory generation platform to compute terrain-aware and shortest-path flight routes that also satisfy all air-risk requirements.
Graduate Student Researcher
ACP Lab, WPI
January 2025 - Present
This project involves developing simulation with differentiable physics to train neural network control policies for high-speed aerial navigation using only depth map.
Robotics Intern
SeiAnmai Technology - Delhi, India
May 2023 - July 2023
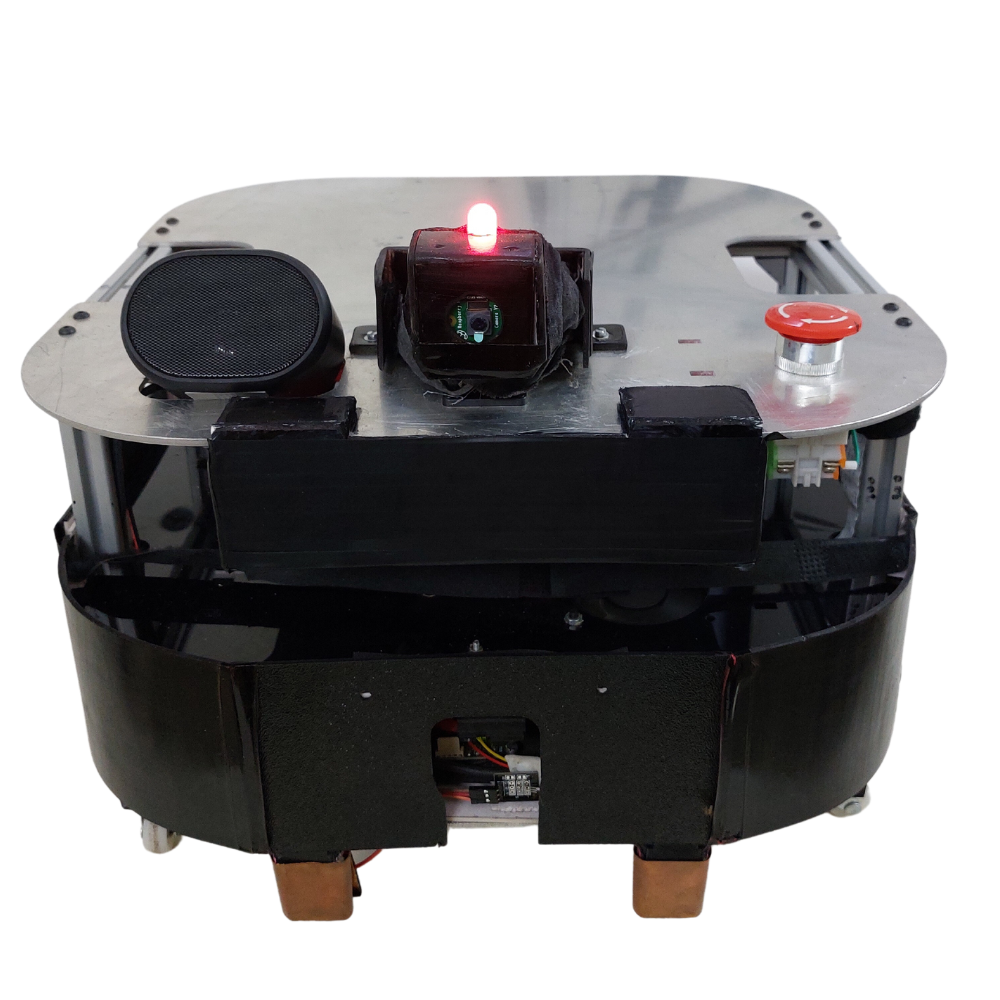
Developed a mobile robot capable of SLAM, autonomous navigation, obstacle detection, and teleoperation. Also permits autonomous docking using ArUco marker detection.
Finite Element Analysis Intern
BluJ Aero - Hyderabad, India
June 2022 - August 2022
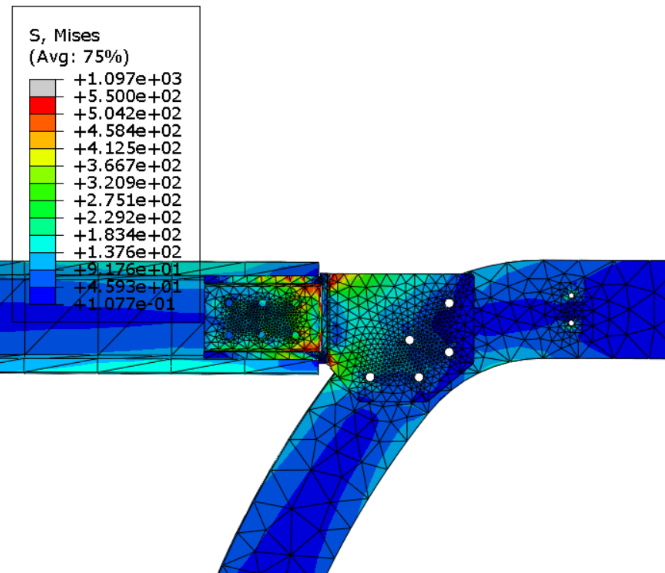
Created a Computer-Aided Design using DS CATIA and Finite Element Analysis using DS Abaqus of the bulkhead, the key load-bearing element for an EVTOL’s fuselage.
Projects
Perception-Driven NMPC with Adaptive CBFs for Reactive Collision Avoidance
The project involves integrating nonlinear model predictive control (NMPC) with adaptive control barrier functions (CBFs) for reactive collision avoidance in agile robots.
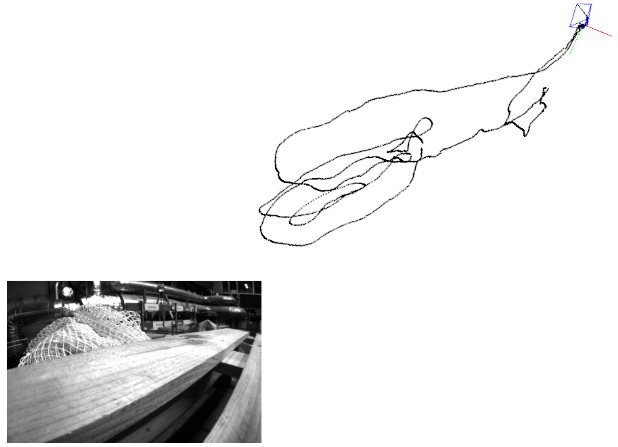
Classical Visual Inertial Odometry
The project involves implementing the MSCKF paper for VIO.
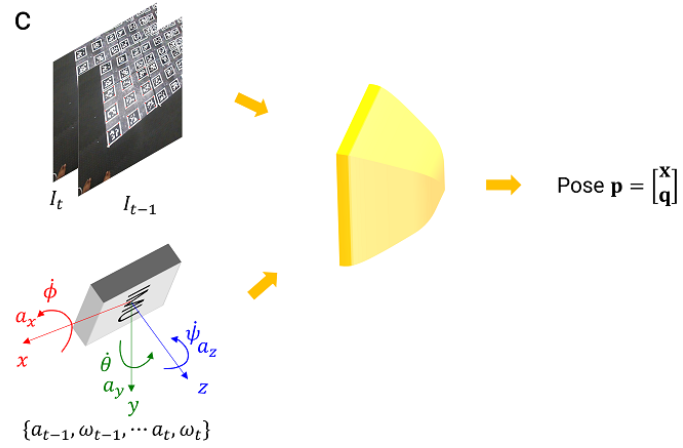
Deep Visual Inertial Odometry
The project involves exploring different deep learning architectures for accurate and robust VIO.
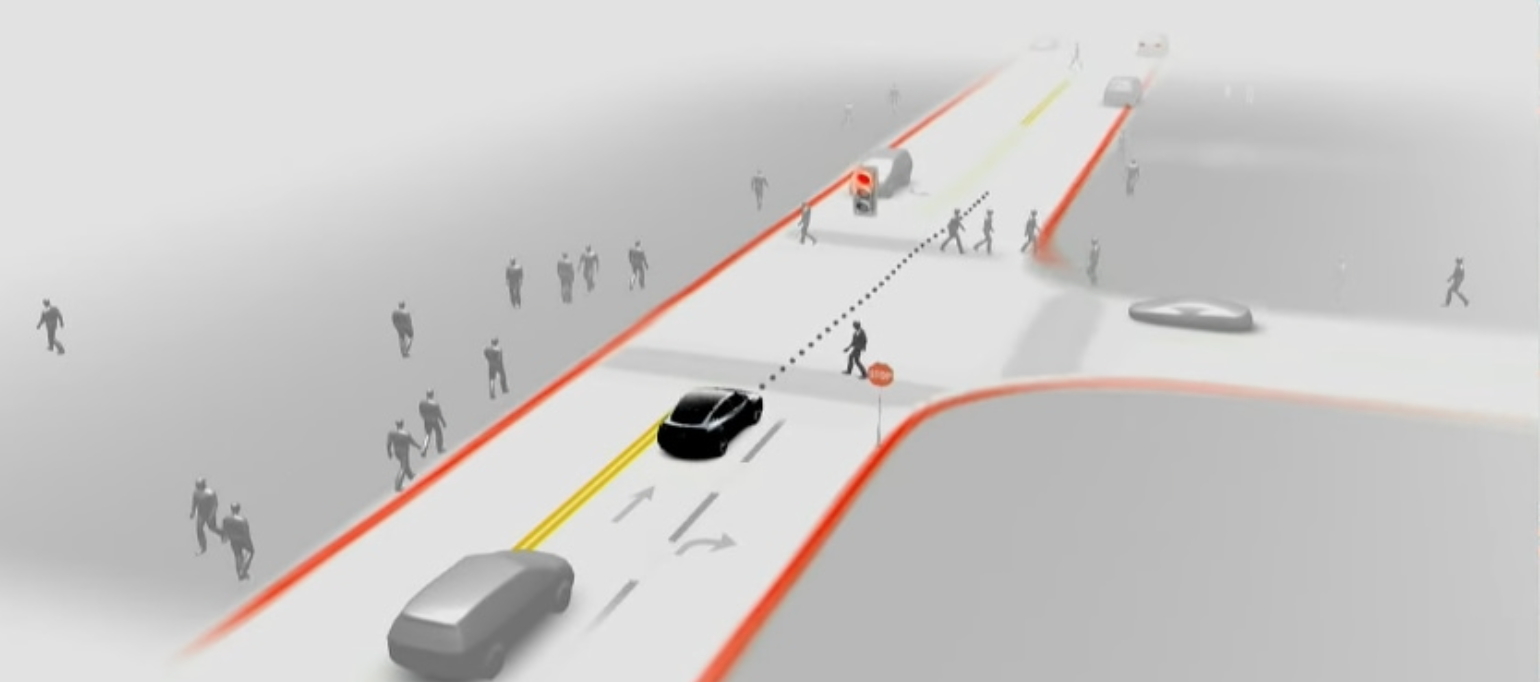
Einstein Vision
This project involves developing visualization similar to Tesla's dashboard using different deep learning model for object detection and localization.
Neural Radiance Fields (NeRF)
This project involves implementing NeRF to synthesize novel views by optimizing a deep neural network to model scene geometry and appearance from sparse input images.
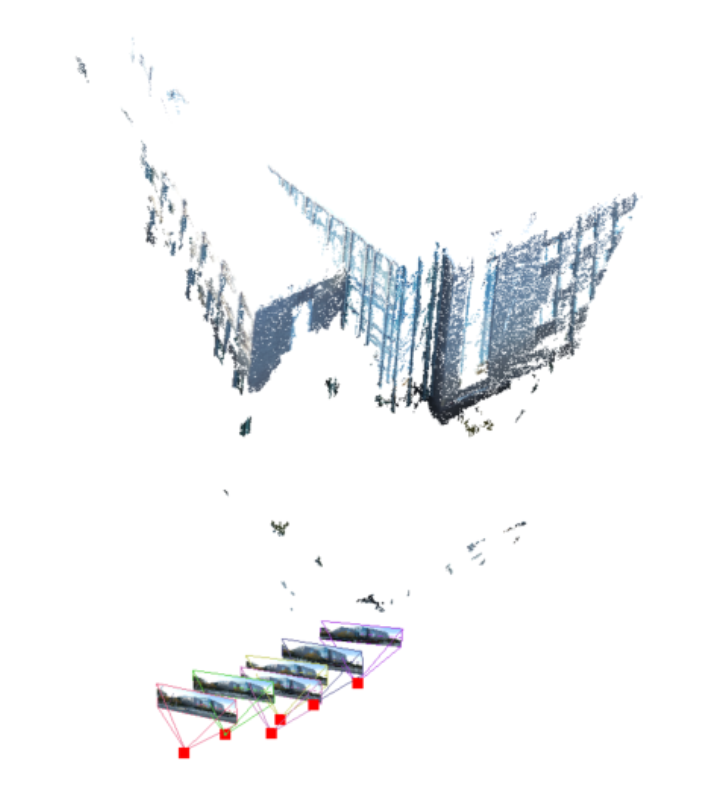
Structure from Motion (SfM)
This project involves developing a SfM pipeline for 3D reconstruction using feature matching, motion recovery, and bundle adjustment to estimate camera positions and 3D points.
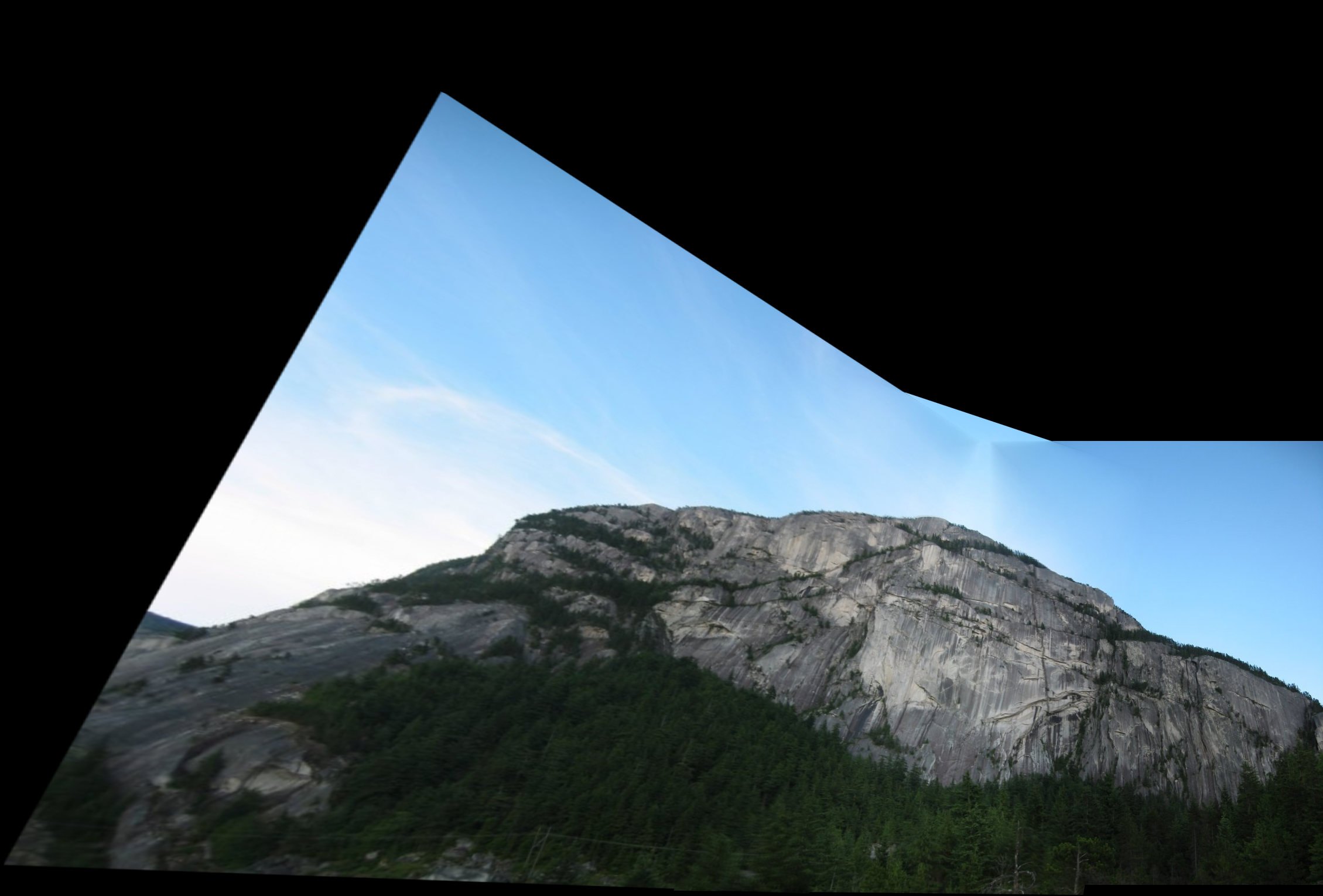
Panorama Stitching using Traditional and Deep Learning
This project involves developing simulation with differentiable physics to train neural network control policies for high-speed aerial navigation using only depth map.
Learning-Based Collision & Clearance Estimator for Manipulators
This project involves developing a neural network-based heuristic for reducing collision-checking and clearance estimation time significantly compared to traditional geometric methods.
Deep Reinforcement Learning for TurtleBot3 Navigation
This project compares DDPG, PPO, TD3, & DQN for autonomous TurtleBot3 navigation.
Perception-aware Model Predictive Control on Quadrotor
This project involves developing a Non-Linear Model Predictive Control for Quadrotor for precise trajectory tracking and also keeping point of interest in camera's frame.
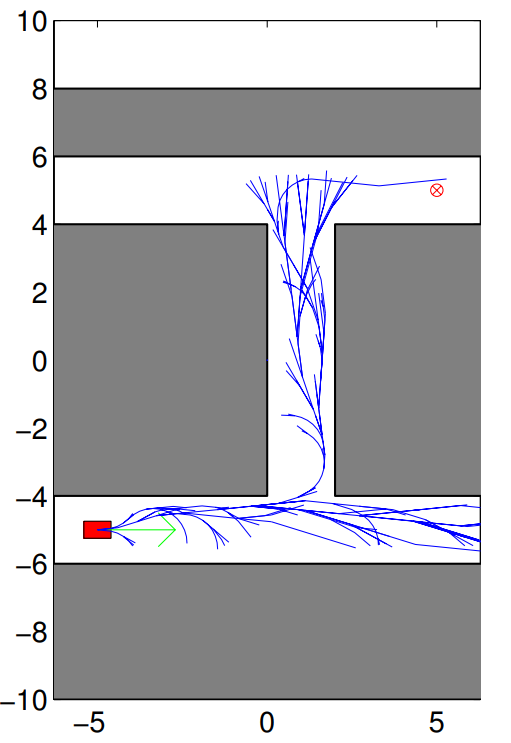
Reachability-Guided RRT for Efficient Motion Planning
This project involves engineering a Reachability-Guided RRT algorithm for efficient motion planning for robot with dynamics constraints.
Breakout using Deep Q-learning Network
This project involves implementing a Prioritized Double Deep Q-Network (DQN) algorithm to optimize performance in the Breakout game

Semantic Image Segmentation
This project involves building a U-Net, a specialized CNN, for semantic image segmentation on a self-driving car dataset to predict pixel-level labels for precise object recognition. The U-Net architecture ensures high-accuracy segmentation, critical for autonomous vehicle navigation and safety.

Trigger Word Detection
Trigger Word Detection with Deep Learning involves building a model to detect the word "activate" in audio streams, enabling devices to wake up upon hearing this trigger. The project includes synthesizing a speech dataset, processing audio into spectrograms, and training a neural network with convolutional and GRU layers to make accurate predictions.
Face Recognition using MTCNN and Inception Resnet
Face Recognition Using Siamese Network leverages deep learning to accurately identify and verify individuals by mapping face images for precise differentiation between similar and dissimilar faces. This project addresses key challenges in face recognition, enhancing convenience across various applications.
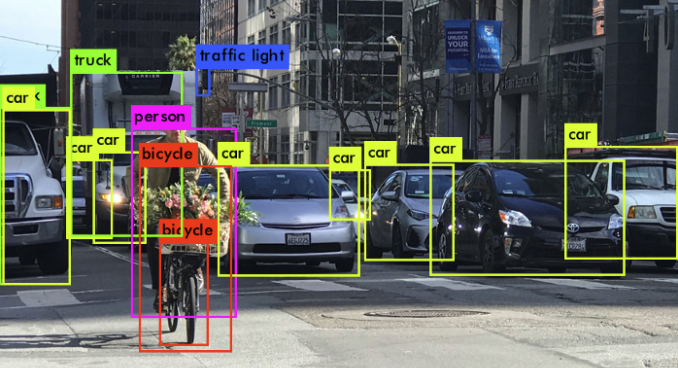
Object Detection using YOLO
This project involves building a U-Net, a specialized CNN, for semantic image segmentation on a self-driving car dataset to predict pixel-level labels for precise object recognition. The U-Net architecture ensures high-accuracy segmentation, critical for autonomous vehicle navigation and safety.
Transfer Learning with MobileNetV2
In this project, I utilized MobileNetV2 for transfer learning to make binary classifier of a custom dataset of Alpaca/Not Alpaca, augmenting the data, and fine-tuning the model for improved accuracy. The process involved adapting a pre-trained model, freezing layers, and optimizing the classifier for specific tasks.
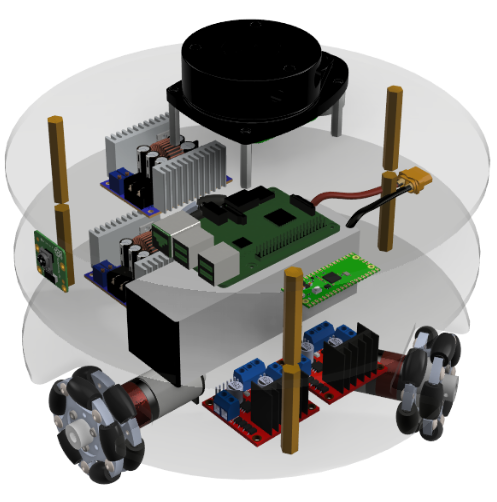
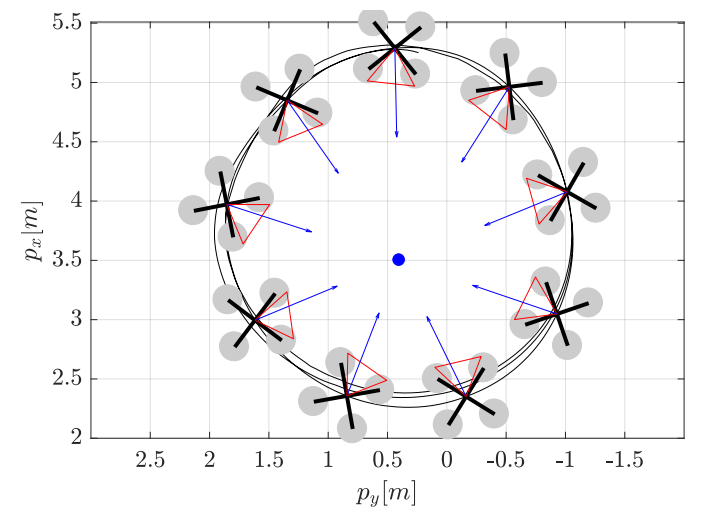
Navigation and Control of Cooperative Mobile Robots
Developing 3-wheel omnidirectional mobile robots capable of Cooperative Navigation as linear formation for pairs of robots and triangular formation for groups of three robots.
Modeling and Estimation of Satellite Attitude Kinematics and Dynamics
MATLAB-based model to simulate the attitude kinematics and dynamics of a satellite under the influence of thruster-generated external moments.
Sentinel Drone
Developed an automated surveillance drone for accident, fire, and anomaly detection. Sent data to control station via GIS (Geographic Information System), used ROS Noetic for communication.
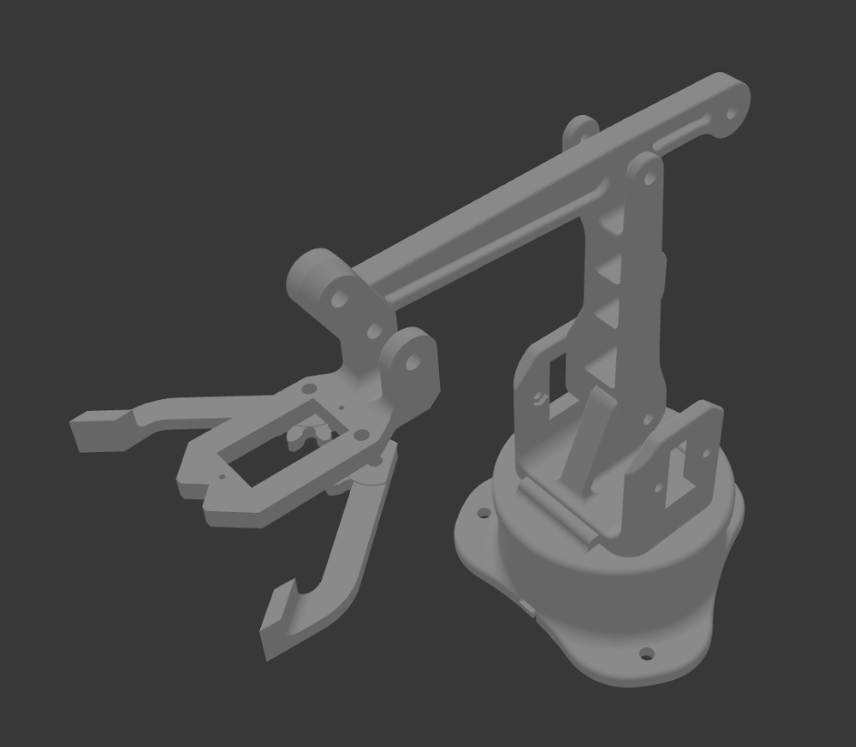
Alexa Voice Controlled Manipulator
Made a 3 DoF robotic manipulator to perform tasks like pick & place, etc. via Alexa Voice commands.
Simulation of V8 Engine
Employed MATLAB to conduct a comprehensive analysis of unbalanced forces and moments within a V8 cross-plane engine configuration.
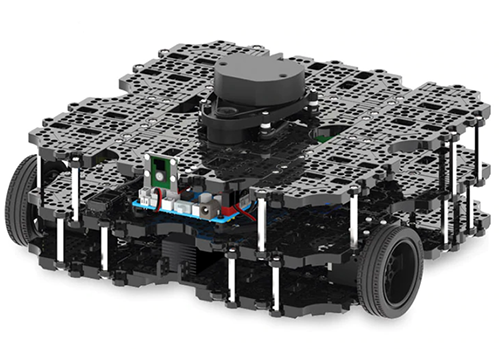
Intruder Detection and Video feedback using TurtleBot3
Developed a TurtleBot3-based surveillance system for intruder detection and video feedback using OpenCV and ROS.

Remote Programming of Pluto 1.2 Drone
Creating a Python wrapper for Pluto nano drone, enabling remote control and autonomous flight, by communiating using MSP (MultiWii Serial Protocol).
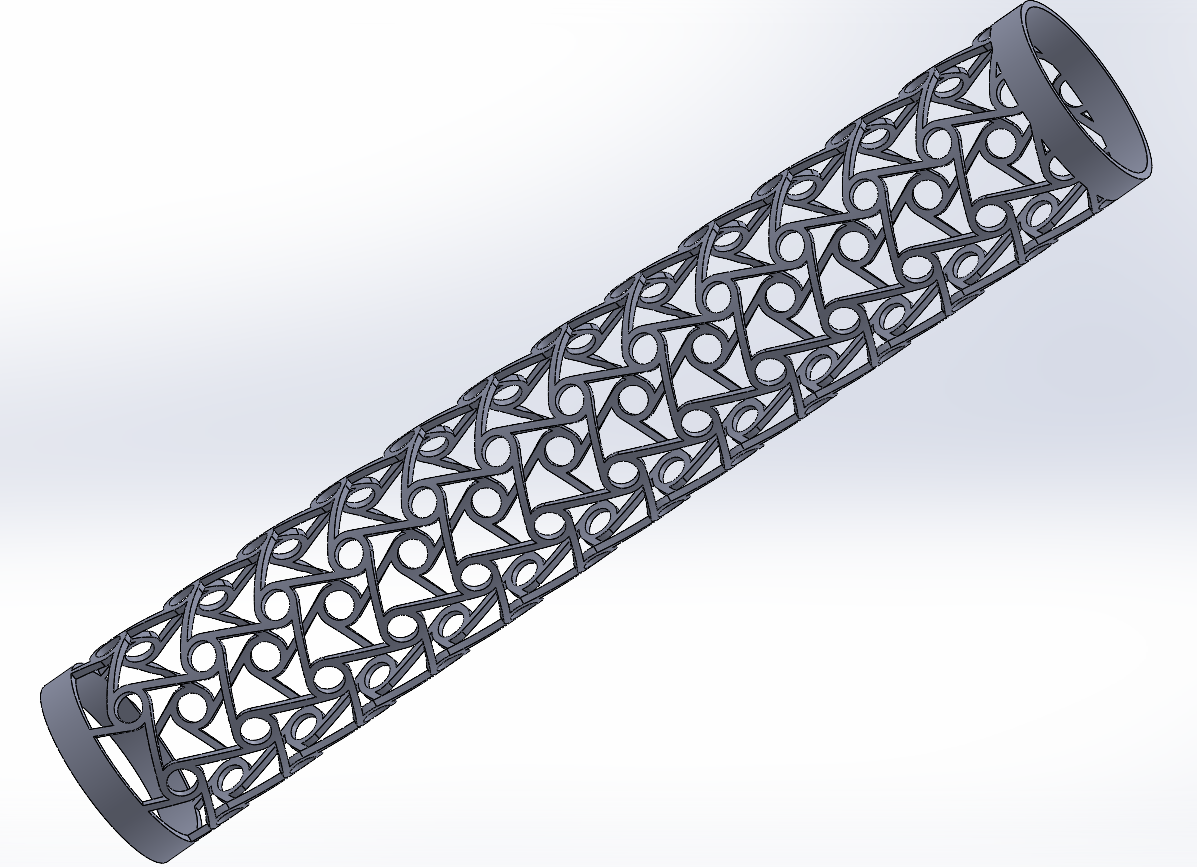
Finite Element Analysis of Tetrachiral Auxetic stent
Performed finite element analysis of a tetrachiral auxetic stent with varying parameters to evaluate its mechanical behavior under different load conditions.
