Guide: Dr. Thiyagarajan R, IIT Tirupati
[Jan'23 - May'24]
BTech Project Report
This project proposes a comprehensive investigation into the navigation of three-wheeled omnidirectional robots, aiming to enhance their manoeuvrability in dynamic and complex environments, making them suitable for tasks requiring precise and agile movements.
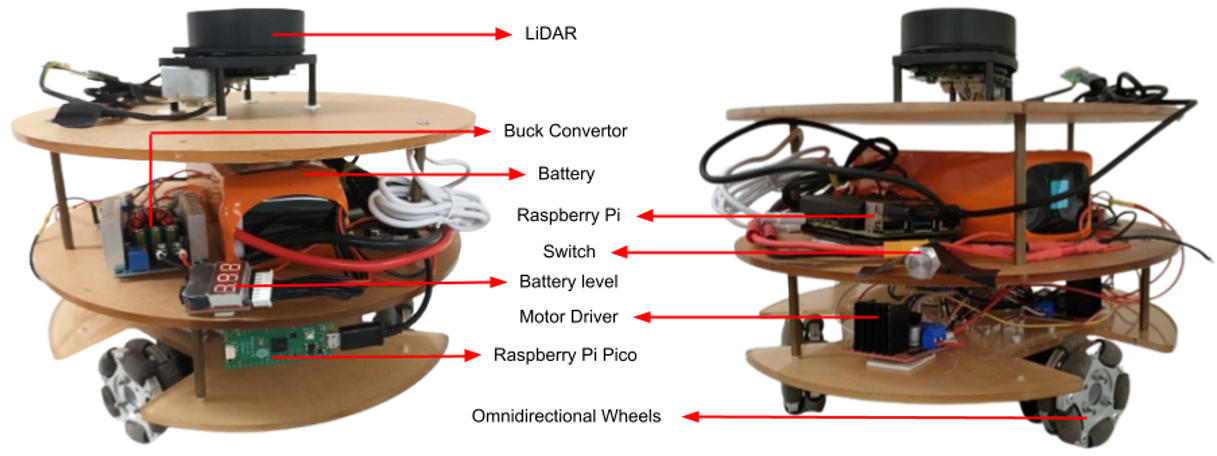
The project thoroughly examines the robots’ hardware and kinematics, focusing on incorporating omnidirectional wheel features into navigation algorithms. Simulations provide controlled environments to validate and optimize cooperative navigation algorithms, considering scenarios like obstacle avoidance and dynamic changes. Integrating LiDAR enhances the robots’ perception capabilities. Path planning algorithms to optimize trajectories for efficiency and collision avoidance, adapting in real-time to dynamic obstacles. Physical experiments with the robot validate the system’s performance and durability.
This project also focuses on developing a multi-agent system that enables seamless communication and coordination among the robots to achieve common navigation objectives. Communication and coordination protocols will be developed through ROS to facilitate seamless information exchange among the robots, employing consensus algorithms and task allocation strategies for effective collaboration. The project aims to contribute to cooperative robotics advancements, finding applications in industrial automation, logistics, and collaborative research environments.