Guide: Robotics Club, IIT Tirupati
[Sept '22]
In this exciting project, I modified the TurtleBot3 waffle equipped with the capability to autonomously navigate to locate objects or intruders in a custom built simulated Gazebo world. This autonomous robot was designed to intelligently avoid obstacles while providing real-time video feedback of its path. The entire system is powered by the Robot Operating System (ROS), which serves as the communication framework between the components and the TurtleBot3 robot.
Key Features and Technologies:
- Autonomous Navigation: The TurtleBot3 is programmed to navigate autonomously within its environment, making decisions to avoid obstacles and reach its destination. This capability is essential for various applications, including surveillance and exploration.
- Object Detection: Using computer vision techniques, the TurtleBot3 is equipped to detect objects or intruders within its surroundings. This feature enhances its utility in security and monitoring tasks.
- Live Video Feedback: The robot provides real-time video feedback of its path, allowing operators to monitor its movements and the objects it encounters. This feedback is crucial for remote surveillance and decision-making.
- ROS Integration: The Robot Operating System (ROS) serves as the communication backbone of this project. It enables seamless coordination between various hardware and software components, ensuring the robot's efficient operation.
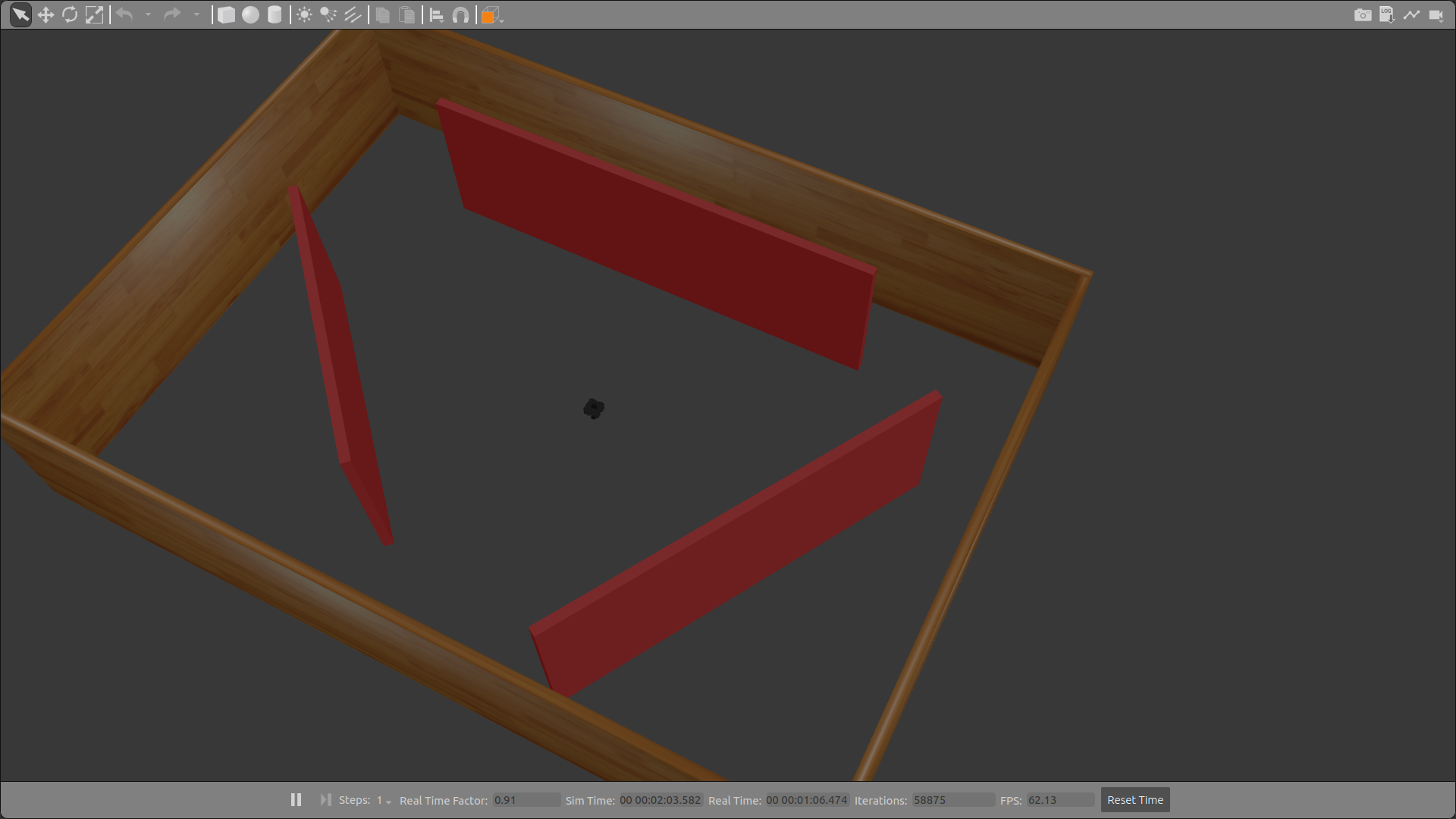
- Gazebo Simulation: To test and validate the robot's capabilities, I utilized Gazebo, a powerful robot simulation tool. Gazebo allows for realistic testing in a virtual environment before deploying the robot in the real world.